How do you work in exoskeleton development?

Building functional exoskeletons requires more than just mechanical skill; it demands a deep integration of physics, advanced control theory, material science, and human factors engineering. The people who work in this dynamic field are essentially bridging the gap between human biology and electromechanical systems, aiming to augment strength, restore mobility, or reduce occupational strain. [1][4] This work is inherently multidisciplinary, meaning that success rarely comes from a single specialist but from teams collaborating across distinct engineering domains.
# Mechanism Basics
At the most fundamental level, an exoskeleton functions by adding external mechanical structure to the human body to assist movement or bear loads. [3] Understanding the core components is the first step in appreciating the development process. Every functional system generally consists of several key elements: the structure itself, which must be strong yet lightweight; actuators (often motors) that provide the required power; sensors that gather data about the environment and the wearer's intent; a power supply; and the central control unit. [3]
The primary engineering challenge is translating the wearer's biological intent into smooth, predictable mechanical action. Sensors, such as potentiometers or force sensors, monitor joint angles and the forces being applied by the user. [3] This data feeds into the control unit, which then dictates how much power the actuators should deliver to the joints. This continuous feedback loop is what makes an exoskeleton feel like an extension of the body rather than a clumsy external machine. [3] Different types exist, ranging from passive systems that use springs and counterweights to assist movement without external power, to active, powered systems designed for significant strength augmentation or powered rehabilitation. [1]
# Design Phases

Developing an exoskeleton follows a structured, iterative engineering process that moves from concept to deployment. One recognized approach involves several distinct stages, each requiring different sets of expertise. [6]
The initial and perhaps most critical phase is defining the use case. Who is the user, and what specific task needs assistance? Is it a factory worker needing reduced strain when lifting repetitive loads, or a paraplegic individual requiring powered gait assistance? The answer heavily influences every subsequent decision, from necessary torque output to required range of motion. [4][6]
Following use case definition comes the mechanical design. This stage focuses on kinematics, structural integrity, and ergonomics. Designers must balance the need for strength—often requiring rigid materials—against the need for light weight and comfort, which necessitates careful material selection. [6][7] The mechanical platform must accommodate the full, safe range of human motion without causing impingement or discomfort. [4]
Next, the electronics and software integration must be handled. This involves selecting appropriate motors, controllers, batteries, and wiring harnesses, which must all be integrated securely within the chosen mechanical structure. [6] The software, which is the brain of the device, needs to interpret sensor inputs and command the motors with millisecond precision. [2]
Finally, the entire system undergoes rigorous testing and refinement. This involves bench testing to ensure mechanical limits are respected, followed by testing on test subjects to validate the human-machine interface (HMI) and safety protocols. [6]
It is essential for development teams to establish quantifiable performance targets very early on. For instance, when developing a device intended for occupational assistance, simply aiming for "less fatigue" is too vague for iterative engineering. A more actionable target might be to specify the expected ratio for a 15-kilogram load lift, allowing engineers to test and tune the control algorithms against a specific, measurable benchmark rather than a subjective feeling. [6]

# Key Disciplines

Working in this field means specializing in one of several key areas that come together to create the final product. The job landscape spans engineers, designers, programmers, and technicians. [8]
# Software Engineering
Software developers are central to the operation, responsible for the real-time control system that mediates between the user and the hardware. [2] Expertise in languages like and Python is frequently required, often coupled with experience in robotics middleware such as the Robot Operating System (). [2] Since exoskeletons directly interact with human movement, these developers must master real-time control theory—ensuring commands are executed with minimal latency to maintain a natural feel. [2] If the control loop lags, the device can feel unresponsive or, worse, actively fight the user's intended motion.
# Hardware Expertise
On the hardware side, mechanical engineers focus on the physical structure and movement, while electrical engineers concentrate on power delivery, sensor integration, and motor drive systems. [6] The mechanical side requires deep knowledge of biomechanics to ensure the structure aligns correctly with human joints, minimizing unwanted torques or shear forces. [4] Furthermore, as the field evolves, electrical engineers are increasingly involved in designing efficient power management systems, as battery life is often a major limiting factor in field use. [3]
For teams to build effectively, a crucial skill, perhaps beyond standard technical requirements, is the ability to translate between these disciplines. A mechanical requirement stated as "must support static load" must be perfectly understood by the software team to set appropriate safety limits in the control code, while the software team’s need for high-resolution encoder data must be clearly communicated to the hardware team selecting sensors. [6] This structured, cross-disciplinary translation process avoids costly integration failures down the line.
# Material Approaches
The definition of what constitutes an "exoskeleton" is broadening, which opens up different avenues for development professionals. [7] Traditionally, the term implied large, rigid frames built from metals or composites designed to support significant loads or provide powerful motion assistance. [1]
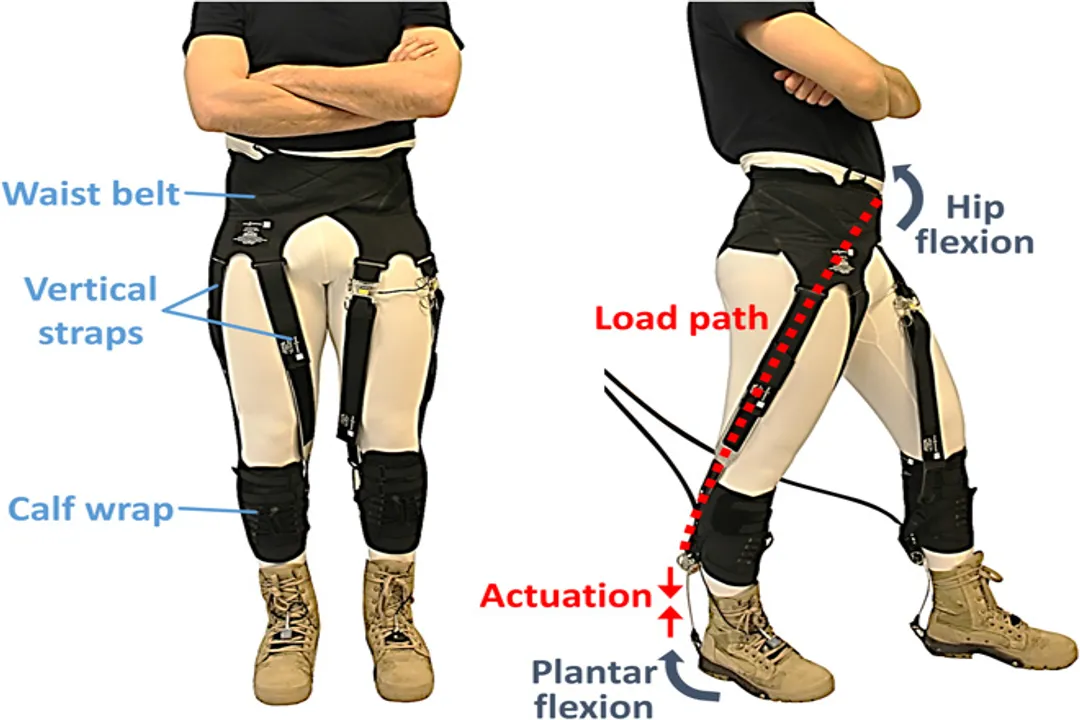
However, a growing area involves soft exosuits. [7] These systems often use textiles and compliant materials rather than rigid frames. Actuation in these systems might come from pneumatic artificial muscles or specialized cable systems instead of traditional electric motors at every joint. [7] Developers working on soft systems require a different skill set, leaning more heavily into areas like smart textiles, flexible electronics, and advanced material science, as opposed to the pure kinematics and structural analysis dominant in rigid frame design. [7] While rigid systems excel at high-force output, soft suits often win out in terms of user comfort, portability, and long-term wearability for lower-level assistance tasks. [1][7]

# Market Landscape
The professional exoskeleton industry is segmented, serving distinct markets that influence development priorities. [1]
# Industrial and Occupational Support
One significant segment focuses on supporting workers in manufacturing, logistics, and construction. [1][4] The goal here is primarily fatigue reduction and injury prevention, often achieved through back-assist or shoulder-support devices that take on a portion of the weight during lifting or holding tasks. [4] Development in this area prioritizes durability, ease of donning/doffing, and a clear return on investment based on reduced workplace incidents. [1]
# Medical and Rehabilitation
Another crucial area is medical application, covering both rehabilitation (helping patients regain function after an injury) and assistive devices (helping individuals with permanent mobility impairments). [1] Development here is intensely regulated, demanding high levels of safety redundancy and extensive clinical validation to prove efficacy and safety in vulnerable populations. [3]
# Development Models
The approach to development itself can vary significantly. While large corporations follow proprietary, closed-loop development cycles, there is also a growing presence of open-source initiatives, such as the Open Exoskeleton project. [5] Working within an open-source environment offers a unique development experience. It often involves adapting existing, community-vetted designs and focusing efforts on specialized areas like improving a specific control algorithm or optimizing a 3D-printable joint component, rather than starting from scratch. [5] This model emphasizes rapid iteration based on community feedback and shared knowledge.
In weighing the career paths, a developer needs to consider the regulatory environment. A person focused on building devices for medical use must become intimately familiar with or equivalent regulatory pathways, which dictate testing rigor and documentation standards. Conversely, someone focusing on industrial tools will face stricter requirements around occupational safety standards and device longevity under harsh conditions. [4][6] The required documentation burden for a medical device often dwarfs that of an industrial support tool.
Related Questions
#Citations
A Beginners Guide to the Exoskeleton Industry
Exoskeleton Controls Developer
How does an exoskeleton work? - Exoskelette.com
Professional Exoskeleton: Complete Guide, Uses, and Tips
How robots are making first steps happen - The NAU Review
How to Design an Exoskeleton
Soft Exosuits | Harvard Biodesign Lab
Q: What is an Exoskeleton job?